Cik efektīvi grīdu notīra dažādi grīdas uzkopšanas roboti? EKSPERIMENTS
Skatoties, kā robots iRobot Roomba tīra telpu, atcerējos dažreiz dzirdēto viedokli – viņš taču atduras pret sienu un uz “bui-dui” haotiski kaut kur aizbrauc. Tomēr, redzot labo tīrīšanas rezultātu, radās interese veikt eksperimentu, lai noskaidrotu, cik vienmērīgi robots spēj noklāt telpu un vai tas ir haoss vai tomēr zinātne, kas liek robotam rīkoties “tikai viņam” saprotamā veidā.
Mūsdienās aizvien plašāku popularitāti gūst mājsaimniecības roboti, kas ikdienā palīdz atvieglot mājokļa uzkopšanas darbus. Tālab pieļauju, ka daudzi no mums ir domājuši par to, vai šie dūcošie dīvainīši tiešām sniedz kādu manāmu atslodzi un kā reāli atšķiras dažādu ražotāju piedāvātie modeļi.
Ne visi roboti ir vienādi gudri
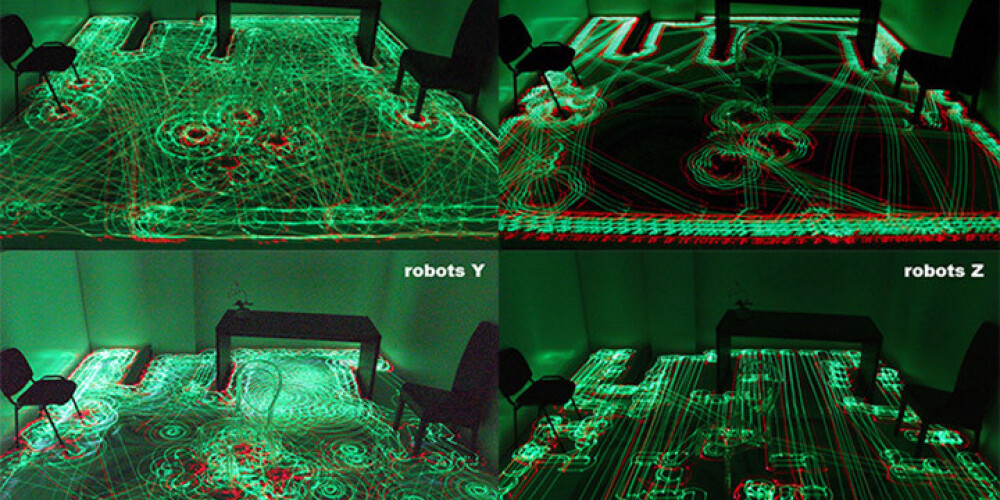
Veikt eksperimentu man palīdzēja Robotu Skolas robotikas inženieri, kuri uz robota novietoja gaismas diodes un uzstādīja fotoaparātu, kas ilgā ekspozīcijā nofilmēja, tieši kādā trajektorijā robots noklāj tīrāmo telpu. Par eksperimenta fotogrāfijām precizēju, ka:
- diodes zaļā krāsā ir novietotas uz robota daļas, kur atrodas birstes un/vai putekļsūcējs, kas spēj netīrumus savākt konteinerā. Tātad uz fotogrāfijas zaļā krāsā atstātās svītras apzīmē ceļu, no kura robots savāca netīrumus vismaz 6 centimetru platumā. Toties diodes sarkanā krāsā apzīmē robota sānu birstes – tās, kas izvirzītas ārpus robota un netīrumus nevis savāc, bet “izķeksē” no istabas kaktiem un pārvieto tuvāk putekļsūcējam vai savācējbirstēm;
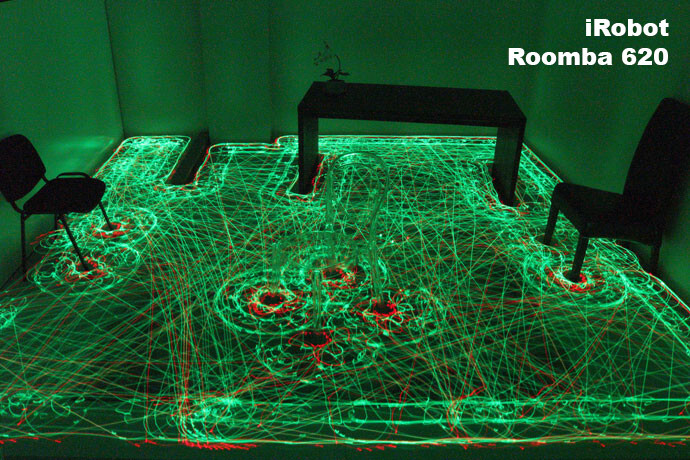
- telpā novietoti 6 šķēršļi: 2 parasti krēsli, 1 caurspīdīgs krēsls (lai tam cauri redzētu robota trajektoriju), 1 galds, 1 šķērslis, kas imitēja nelielu starpsienu, kā arī paklājs;
- telpas pirms eksperimenta tika ļoti labi iztīrītas, lai robotiem (arī iRobot Roomba), kas aprīkoti ar netīrumu sensoriem, nenāktos netīrākās vietas tīrīt pastiprināti, tādējādi radot nevienmērīga telpas noklājuma iespaidu.
iRobot šo telpas noklāšanas algoritmu sauc par adaptīvo algoritmu – iAdapt, jo robots katru telpas vietu dažādos leņķos notīra vairākas reizes, nevis uz dullo/haotiski mainot savu kustības trajektoriju, bet gan reaģējot uz sajustajiem un izmērītajiem telpas parametriem, šķēršļiem, netīrumiem. Piemēram, sastopot sienu vai šķērsli, robots tam seko un tīra cieši gar to. Bet robots nevar mūžīgi sekot šķērslim, jo tādā veidā viņš iztīrīs tikai šauru joslu gar sienām. Tātad robotam jāsaprot, kuros brīžos ir jādodas telpas iekšienē. Bet arī tur viņš nevar bezmērķīgi braukāt – ir jāsameklē visi objekti telpā, jāaptīra tiem apkārt, jāiztīra brīvās teritorijas, jāsaprot, vai robots nav ieciklējies kādā šaurā “bezizejā” (piemēram, starp krēsla kājām), un jāprot no turienes tikt ārā. Šī zinātne tiek saukta par “uzvedības robotiku”, un tā ir radusies, pētot skudru uzvedību, kuras, nesaprotot visas pasaules uzbūvi, tomēr lieliski tiek galā ar saviem lokālajiem uzdevumiem – objektu savākšanu, šķēršļu pārvarēšanu u. c. Šis precīzais iRobot algoritms nav publicēts, bet, ilgi vērojot iRobot Roomba robota kustību, rodas pārliecība, ka robotam ir prioritāšu plānotājs – robotam, vadoties pēc paveiktā darba un uzzinātās informācijas par tīrāmo telpu, mainās prioritātes – kurš uzvedības algoritms konkrētajā brīdī ir kļuvis par prioritāro, tas arī tiek realizēts līdz brīdim kad kāds cits algoritms iegūst augstāku prioritāti.
Lai saprastu, cik šādā algoritmā ir zinātnes un cik viegli to ir atdarināt, izmēģinājām citu ražotāju grīdas uzkopšanas robotus.
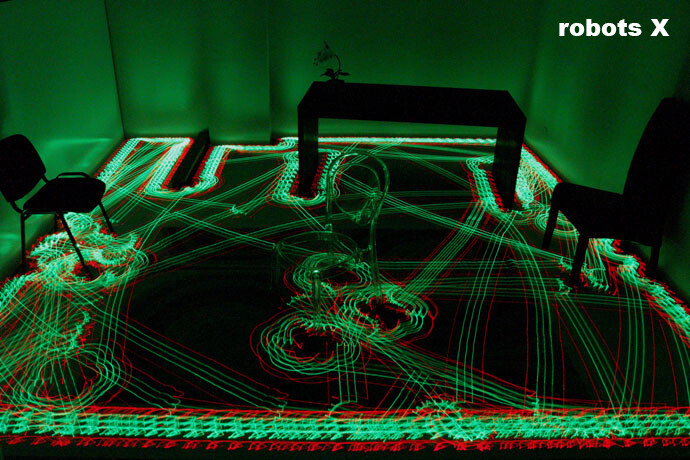
Acīm redzams, ka šis robots pārāk aizraujas ar telpas tīrīšanu gar sienām un nespēj saprast, cik liela ir telpa un ka telpas vidus ir jātīra daudz intensīvāk. Praktiski visa telpas vidusdaļa ir palikusi neiztīrīta. Šā iemesla dēļ daži vienkāršāku robotu ražotāji atbildību par tīrīšanas kvalitāti uztic cilvēkiem, robotam pievienojot režīmu izvēles pogas – gar sienām, pa spirāli, zig-zag utt., un tad cilvēks var mēģināt katru dienu robotam likt tīrīt citā režīmā, cerot, ka pēc vairākām dienām rezultāts būs labs. Testējamajam robotam šis bija vienīgais iespējamais tīrīšanas režīms.
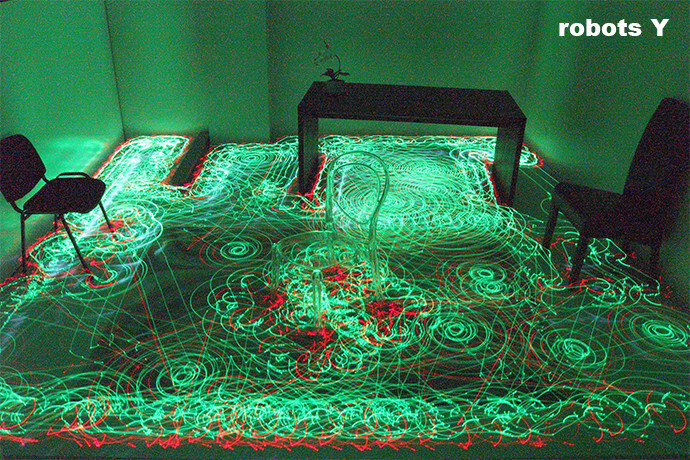
Rezultāts nav tik vājš kā ražotaja X robotam, bet acīm redzami dažās vietās robots ir ieciklējies un tīrījis desmitiem reižu, citās vietās nav bijis ne reizi. Acīmredzot pirmajā fotogrāfijā redzētais iRobot Roomba adaptīvais algoritms tomēr ir zinātne, nevis haoss, un to pat 10 gadu laikā nav izdevies nokopēt, lai sasniegtu līdzvērtīgu rezultātu.
Protams, rodas jautājums – kāpēc ir jābrauc krustām šķērsām, ja varētu vienkārši braukt taisnās līnijās – viena blakus otrai? Tāpēc vēl viens tests.
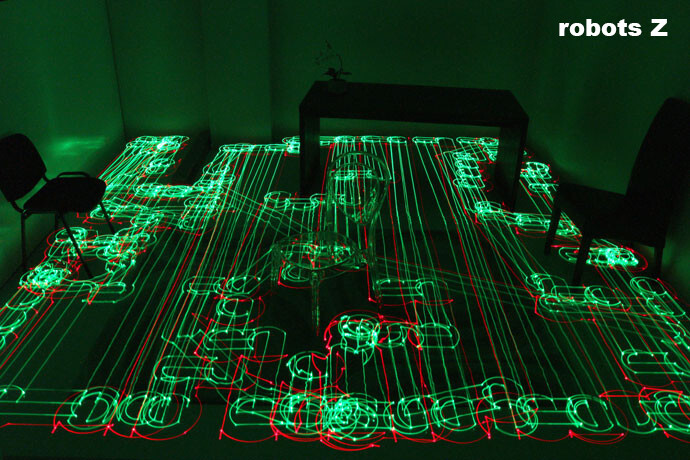
Rodas iespaids: ja telpa būtu bez šķēršļiem, šis būtu labs algoritms. Bet, tā kā telpās cilvēki mēdz salikt mēbeles, ir redzams, ka, taisnās līnijās braucot, robotam brīžiem rodas neskaidrība, pa kuru pusi šķērsli apbraukt, jo ne jau vienmēr šķērslis trāpās robotam cieši gar vienu malu. Tāpēc te arī ir palikušas lielas neiztīrītas platības zem vidējā krēsla, ap galda kājām un vēl pāris vietās. Rodas arī jautājums, vai, katru telpas daļu pārbraucot tikai vienu reizi, rezultāts ir tikpat labs, kā katru telpas daļu pārbraucot vairākas reizes dažādos virzienos, kā tas ir redzams pirmajā fotogrāfijā?
Man radās arī jautājums – cik lielu platību katrs robots var iztīrīt šādā kvalitātē? Piemēram, iRobot Roomba 620, izmantojot adaptīvo algoritmu iAdapt, kvalitatīvi var iztīrīt telpas, kuru kopējā platība ir ap 40–60 kvadrātmetru. Ja platība ir lielāka, tad ir vai nu jātīra dažas telpas atsevišķi, vai jāizmanto vēl gudrāki iRobot Roomba modeļi, kam var likt telpas tīrīt secīgi.
Šā testa secinājums ir: ne visiem robotiem, kuru kustība trajektoriju mēs pirmajā brīdī nesaprotam, tā tiek izvēlēta “uz dullo”. No fotogrāfijām ir acīm redzams, ka iRobot Roomba telpu vienmērīgi noklājošā trajektorija ir sarežģīta zinātne, kas nav viegli atkārtojama.
Taču tirgū ir pieejamas ierīces, kuras arī sauc par robotiem, bet kuras uzvedas ne tuvu tā kā labākie robotu pārstāvji. Tātad pirms robota iegādes noteikti vajag izmēģināt, vai tas ir tieši tas, kas mums palīdzēs atvieglot mājas soli, jo pat līdzīgā cenu kategorijā darbības kvalitāte ir būtiski atšķirīga.
Analizējot nofilmētās robotu trajektorijas, ir arī jāņem vērā, ka eksperiments ir veikts vidēji lielā telpā, ~25m2, kurā nav pārāk daudz mēbeļu un kas labākajiem robotiem ir viegls uzdevums. Jo lielākas telpas un vairāk mēbeļu, jo robotu uzdevums ir grūtāks un sasniedzot noteiktu grūtības pakāpi, pat visgudrākajam robotam telpas var izrādīties par lielām un par sarežģītām. Tāpēc iegādājoties robotu der ievērot ražotāja ieteikumus - cik lielām telpām robots paredzēts un der arī robotu pirms iegādes izmēģināt savās telpās. Ir robotu ražotāji kas to piedāvā, piemēram http://www.irobot.lv/test/ .

iRobot servisa centrs: Bieķensalas iela 21 (Mūkusalas biroju ēka, blakus t/c Rīga Plaza)
Vairāk par iRobot grīdas uzkopšanas robotiem var uzzināt irobot.lv vai piezvanot 202 44 222
Ja arī jums ir interese par iRobot, varat pieteikties testam, zvanot pa tālruni 20244222 vai elektroniski mājaslapā
Autore: Inta Mengiša/ Reklāmraksts tapis sadarbībā ar iRobot / Publicitātes foto